
„A robotika és a beágyazott intelligencia tudományának, tervezésének és társadalmi szerepének megértése a küldetésünk. Multidiszciplináris megközelítésünk célja önállóan,  egymással vagy velünk, az emberi társadalomban dolgozni képes autonóm eszközök létrehozása.”
egymással vagy velünk, az emberi társadalomban dolgozni képes autonóm eszközök létrehozása.”
A dicséretes célkitűzéseket a Bristol és a Nyugat-angliai Egyetem közti együttműködés keretében, 2006-ban alapított Bristol Robotlaboratóriumban (BRL) fogalmazták meg. A kutatók szerint a terület jelene és jövője multidiszciplináris szakértelmet igénylő interdiszciplináris megoldásokon alapul: a high tech csak különböző tudományterületek együttes alkalmazásával tudja kihasználni az új anyagok, például mesterséges izmok adta lehetőségeket.
A krédó (szinte mindenre nyitott) szellemében a laboratórium kutatócsapata változatos diszciplínákat képvisel: kognitív tudományt, informatikát, mikrobiológiát, fizikát, biológiát, idegtudományokat, (villamos-, gépész- és légi járművekkel foglalkozó) mérnöki szakterületeket.
Patkány, cickány
Az interdiszciplináris kivitelezés egyik legizgalmasabb példája a SCRATCHbot, egy robotpatkány. A gépet irányító, szilíciumból készült neurális architektúrát patkány agyáról mintázták. A biológiai modellhez hasonlóan, a robot is bajsza segítségével tájékozódik, azonosít tárgyakat. A következő, cickányszerű géphez gyorsan mozgó tárgyakat is érzékelő új szenzort fejlesztenek. A mechanikus rágcsálók, a mesterséges érintés általános rendeltetése az emberi tudat jobb megértése: hogyan irányítja az agy az érzékelőrendszert, a mozgást.
Munkáikban egy másik általános kérdésre is keresik a választ: mi a leghatékonyabb és energiatakarékosabb módja egy-egy cselekedet kivitelezésének? Ezeket a megoldásokat a Homo sapiens ösztönösen alkalmazza, nem gondolkodik róluk. Tehát a robotnak is hasonlóan kellene eljárnia – a laboratóriumban fejlesztett, a gép karjának emberszerű mozgásáért felelős kontrolmechanizmusok pontosan ezt a célt szolgálják.
Biztonságos ember-robot együttműködés
Az ember-gép kapcsolat egyik legfontosabb aspektusát, a biztonságos együttműködést, a megfelelő viselkedést generáló kognitív modelleket szintén tanulmányozzák. Ha egy robot  érzékeli a környezetét, és tanul belőle, mozgását jobban irányítja, cselekedetei kiszámíthatóbbá, érthetőbbé válnak, az interakciók is egyre biztonságosabbak lesznek.
érzékeli a környezetét, és tanul belőle, mozgását jobban irányítja, cselekedetei kiszámíthatóbbá, érthetőbbé válnak, az interakciók is egyre biztonságosabbak lesznek.
Az európai uniós CHRIS (Cooperative Human Robot Interactive Systems) keretében e problémákra keresnek megoldást: ha valódi környezetben és élethelyzetben, például a konyhában dolgozunk együtt egy robottal, hogyan valósítsuk meg a közös célt (étel elkészítését stb.), az együttműködést mennyiben és milyen verbális, illetve nem verbális kommunikáció teszi eredményessé, biztonságossá? Történjen szavakkal, gesztusokkal, arckifejezésekkel, számunkra egyértelmű az interakció, a gépnek viszont nagyon bonyolult, hosszadalmas folyamat elsajátítania a számunkra magától értetődőt.
A laboratóriumban tervezett két robotfej, Jules és Eve rendeltetése arckifejezések elsajátítása. Az embert próbálják utánozni. A projekt rajtuk keresztül juthat el a végső cél, a humán felhasználóval értelmes – és természetesen biztonságos – kommunikációt folytató robot létrehozásához.
EcoBot II
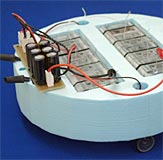 A BRL összes kezdeményezését a biológia inspirálja, természetes – élő – rendszerek a minták; azok alapján egyrészt mesterségesintelligencia-megoldásokat (kollektív energiatakarékosság rajintelligencián keresztüli megvalósítása), másrészt robotkészítésre alkalmas új anyagokat kísérleteznek ki. Utóbbit jól szemlélteti, hogy a laboratóriumban fejlesztettek először mikrobiális (mikrobákkal működtetett) üzemanyagcellát. Ilyen cellákat építettek be EcoBot II-be, a világ első robotjába, amely biológiai eredetű szervesanyag-tömeget, biomasszát elektromossággá alakítva olyan tevékenységeket kivitelezett, mint az érzékelés, információfeldolgozás, kommunikáció és mozgás.
A BRL összes kezdeményezését a biológia inspirálja, természetes – élő – rendszerek a minták; azok alapján egyrészt mesterségesintelligencia-megoldásokat (kollektív energiatakarékosság rajintelligencián keresztüli megvalósítása), másrészt robotkészítésre alkalmas új anyagokat kísérleteznek ki. Utóbbit jól szemlélteti, hogy a laboratóriumban fejlesztettek először mikrobiális (mikrobákkal működtetett) üzemanyagcellát. Ilyen cellákat építettek be EcoBot II-be, a világ első robotjába, amely biológiai eredetű szervesanyag-tömeget, biomasszát elektromossággá alakítva olyan tevékenységeket kivitelezett, mint az érzékelés, információfeldolgozás, kommunikáció és mozgás.
„Valódi science-fiction, ami itt történik” – jelentette ki elragadtatottan a bristoli laborról Iain Grey, a brit kormány által finanszírozott Technológia Stratégia Tanács ügyvezető elnöke.






