A MIT kutatói olyan autonóm robotokat teveztek, amik a Mexikói-öbölből felitatják a tengeren úszó olajfoltokat. Az elképzelések szerint a robot-tutajok egymással kommunikálva derítenék fel és tüntetnék el a szennyeződést.
A hagyományos körbekerítésen és szivattyúzáson alapuló módszerekkel eddig csupán 3%-át sikerült eltüntetni a Deepwater Horizon katasztrofája nyomán kiömlött olajnak. Az MIT kutatói most a mesterséges intelligencia egyik érdekes kutatási területét: a rajintelligenciát akarják segítségül hívni a környezeti károk enyhítése érdekében.
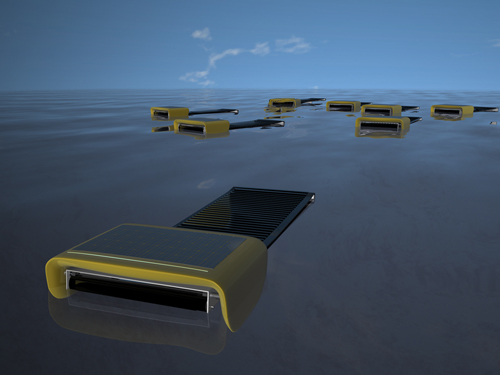
A katasztrófa elhárítása során már eddig is többször vetettek be robotokat, bár ezek többsége távolról, kézzel irányított szerkezet volt. Az MIT-n most olyan SeaSwarm (Tengeri Raj) névre keresztelt, autonóm robot-hajókat szerkesztettek, amik egy speciális nanotechnógiával kifejlesztett anyag segytségével felitatják az olajat a víz felszínéről. Az egyenként 10nm-es tutajok Wifi és GPS segítségével kommunikálnak egymással. Amikor az egyik felfedez egy olajfoltot, odahívhatja a többieket, akik segítenek neki a terület szisztematikus megtisztításában. Ha végeztek az adott résszel, akkor újra szétszélednek, hogy felfedezzék merre van még további szennyeződés.
A lélekvesztők napelemmel, emberi beavatkozás nélkül működnének. Az előzetes számítások alapján 5000 robot-tutaj csupán 1 hónap leforgása alatt tudná feltakarítani az összes szennyeződést. A működőképes prototípus megtekinthető a nemrég megnyílt Velencei Biennálén.