
 A mai robotika egyik legizgalmasabb törekvése, hogy a gépek tárgyakkal kapcsolatos cselekvéseik alapján tanuljanak meg „gondolkodni”, ismerjék meg környezetüket. A kogníció-elmélet új megközelítése izgalmas jövőbeli szerkezeteket eredményezhet.
A mai robotika egyik legizgalmasabb törekvése, hogy a gépek tárgyakkal kapcsolatos cselekvéseik alapján tanuljanak meg „gondolkodni”, ismerjék meg környezetüket. A kogníció-elmélet új megközelítése izgalmas jövőbeli szerkezeteket eredményezhet.
Cselekedve gondolkodás
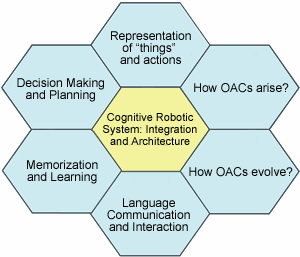
A cselekedetek beszédesebbek a szavaknál, különösen, ha végrehajtójuk nem ember, hanem robot. A nemrég lezárult, de – más formában természetesen folytatódó – európai uniós PACO-PLUS projekt kutatói ebből az alapkoncepcióból kiindulva, az azt reprezentáló úgynevezett object-action complexes (OACs) elméletet tesztelték, és készítettek terveket a gyakorlati kivitelezésre.
Megfogalmazásuk szerint az OAC-k – a jövő gépi kogníciójának paradigmájaként, érzékelést és cselekvést kombinálva – „cselekedve gondolkodó” egységek, hardverüket és szoftverüket úgy tervezik, hogy a robot „elgondolkodhasson” tárgyakkal kapcsolatban. Például ha az adott objektumnak van fogantyúja, megfogja, ha található rajta nyílás, valamit odatesz, esetleg folyadékkal megtölti, ha nyílással, ajtóval rendelkezik, kinyitja stb. Az OAC-ket a robot minden egyes alkalommal rögzíti, lementi, az anyagok más robotok anyagaival csereberélhetők, bizonyos idő után kutatási célokra remekül használható könyvtárnyi matéria áll össze belőlük.
Emergens intelligencia
 Elvileg, ha rendelkezésére áll a szükséges (csekélynek egyáltalán nem mondható) időmennyiség, egy robot többezer interakciós lehetőséget próbálhat ki: miként kezelje az adott tárgyat, fogja meg, kerülje ki, törje össze? Rájön, mikor melyik az optimális megoldás. Először minden oldalról átvizsgálja, és csak utána képes bármikor azonosítani. És így tovább, lépésről lépésre halad, több objektumot ismer meg, bővül a lehetőségek köre, nő a lehetőségek (OAC-k) közti kombinációk, potenciálisan hatékony stratégiák száma.
Elvileg, ha rendelkezésére áll a szükséges (csekélynek egyáltalán nem mondható) időmennyiség, egy robot többezer interakciós lehetőséget próbálhat ki: miként kezelje az adott tárgyat, fogja meg, kerülje ki, törje össze? Rájön, mikor melyik az optimális megoldás. Először minden oldalról átvizsgálja, és csak utána képes bármikor azonosítani. És így tovább, lépésről lépésre halad, több objektumot ismer meg, bővül a lehetőségek köre, nő a lehetőségek (OAC-k) közti kombinációk, potenciálisan hatékony stratégiák száma.
Idővel egyre többet képes tenni a tárggyal, egyfajta kép alakul ki róla. Minél több objektumról van elképzelése, annál közelebb kerül az implicit következtetéshez, autonóm gondolkodáshoz. Magától tanul meg egyszerű, majd egyre összetettebb cselekvéseket, jelképeket sajátít el, amelyeket megoszt, együtt használ humán környezetével. A jelképek rendszere egyszer kezdetleges nyelvvé állhat össze. Ezen a ponton kapcsolódik a megközelítéshez egy másik érdekes elmélet, az emergencia, a komplexitás tudománya: viszonylag egyszerű szabályok összjátékának következményeként bonyolult viselkedésformák, rendszerek alakulnak ki. Sommásan fogalmazva, az élet keletkezése is így történt, hiszen a DNS-t mindössze négy bázis alkotja.
Miért humanoidok?
A PACO-PLUS megközelítése több szempontból emlékeztet a csecsemő tanulási folyamatára is. Amikor új tárgy kerül a babák közelébe, igyekeznek megfogni, esetleg megenni, vagy például hozzávágni valamihez. Próbálgatják, hibáznak, mással próbálkoznak, folyamatosan tanulnak megfigyeléseikből és tapasztalataikból. Az embereket szintén megfigyelik, utánozzák a felnőtteket, állandóan új ismeretekkel gazdagodnak, mígnem rájönnek, hogy – komplexebb célokat megvalósítva – cselekvések együttesen is kivitelezhetők. A kilincset meg lehet fogni, el lehet fordítani, és máris kinyílik az ajtó.
Ugyan dolgoztak hagyományosabb, ipari robotokkal is, de a projekt keretében folytatott legtöbb kísérletet, bemutatót humanoidokkal végezték. Az utánzást és az ember általi  irányítást is tesztelték. Elégedettek az eredményekkel. Úgy ítélik meg, hogy négy év alatt nagyon messzire jutottak. A szakmai közönség szintén pozitívan értékeli a PACO-PLUS-t.
irányítást is tesztelték. Elégedettek az eredményekkel. Úgy ítélik meg, hogy négy év alatt nagyon messzire jutottak. A szakmai közönség szintén pozitívan értékeli a PACO-PLUS-t.
A választás azért esett „emberszerű” gépekre, mert „összetett érzékelési és motorikus adottságaik miatt ideális alanyok a kogníció és a kognitív információfeldolgozás tanulmányozására” – magyarázza Tamim Asfour (Karlsruhei Technológiai Intézet, KIT), a PACO-PLUS egyik koordinátora.
Biológiai minták
 Asfour a robotika egyik nagy újítójára Rodney Brooks-ra hivatkozik. Az MIT Számítástudományi és Mesterséges Intelligencia Laboratóriumának egykori igazgatója már az 1980-as években úgy vélte, hogy a kogníció a környezet érzékeléséből és az azzal folytatott interakciós képességből alakul ki. Miután megtanultunk járni és a környezetünkkel kommunikálni sokkal könnyebben ment a magas szintű absztrakt-szimbolikus következtetés.
Asfour a robotika egyik nagy újítójára Rodney Brooks-ra hivatkozik. Az MIT Számítástudományi és Mesterséges Intelligencia Laboratóriumának egykori igazgatója már az 1980-as években úgy vélte, hogy a kogníció a környezet érzékeléséből és az azzal folytatott interakciós képességből alakul ki. Miután megtanultunk járni és a környezetünkkel kommunikálni sokkal könnyebben ment a magas szintű absztrakt-szimbolikus következtetés.
Brooks a feje tetejére állította a korabeli mesterségesintelligencia-kutatást: korábban az a megközelítés volt elfogadott, hogy ha minél több intelligenciát „teszünk” egy gépbe, minél komplexebb a világmodellje, annál jobban oldja meg a problémákat, reagál a világra. Brooks szerint pont fordítva kell eljárni: először az érzékelés és az interakció legyen hatékony, tanuljon belőlük a gép, és az intelligencia spontán ki fog fejlődni.
A mai felfogás a két megközelítés szintézisében látja az „üdvözítő” utat, ugyanakkor egyre többen gondolják, hogy az MIT-guru biológiai indíttatású elképzeléseit alapul véve könnyebb a laboratóriumi falakon kívül is jól működő, egyszer majd intelligens robotot fejleszteni. A PACO-PLUS kutatói szintén Brooks mellett törtek lándzsát.





